
Функциональная диагностика ВНЧС. Ошибки и их решение
Мы всегда испытывали повышенный интерес к работе с индивидуальными параметрами артикуляции нижней челюсти. Если задуматься, что отображают траектории движений н/ч? Они являются результатом работы не только височно-нижнечелюстных суставов (головок н/ч и менисков), но и мышечной системы, связок и зубных рядов.
О диагностике внутренних нарушений ВНЧС с помощью МРТ на вебинаре Диагностические алгоритмы МРТ ВНЧС.
Проводя ортодонтическое, ортопедическое и терапевтическое лечение, врач изменяет и создает новые параметры для артикуляции н/ч или пытается сохранить прежние. То, насколько новые условия будут функциональны для работы вышеописанного комплекса анатомических структур, покажет время. В этой статье мы хотели бы поговорить об основных этапах, которые являются неотъемлемой составляющей при первичной функциональной диагностике ВНЧС, и оборудовании, которое необходимо для диагностики.
Условно, работу врача с применением дополнительного оборудования можно разделить на работу в реальном и виртуальном пространствах. Единым критерием успешного результата работы в этих двух форматах является правильность использования оборудования, понимание его технических возможностей и точность его программирования.

I этап: перенос положения в/ч в артикулятор с применением среднеанатомических лицевых дуг, возможные проблемы и их решения
Среднеанатомические и анатомические лицевые дуги используются для переноса гипсовой модели в/ч в артикулятор. То, насколько правильно лицевая дуга расположена на голове пациента, влияет на последующую диагностику и результат лечения. Существует два вида среднеанатомических лицевых дуг: ориентирующиеся на голове пациента по накожным ориентирам относительно Камперовской или Франкфуртской плоскости (рисунок 1).
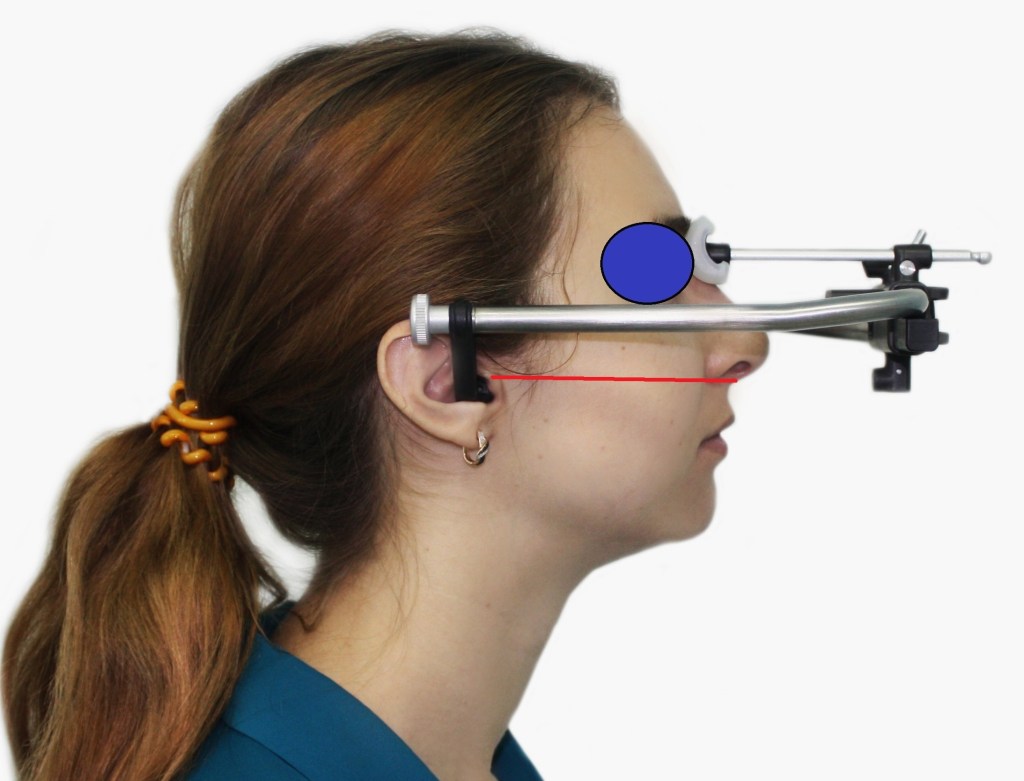
Рисунок 1. Расположение лицевой дуги Arcus (Kavo).
Не во всех клинических случаях накожные ориентиры совпадают с костными, в дальнейшем это может приводить к ошибкам при гипсовке модели в/ч. Принципом работы с такой дугой является обязательное соблюдение параллельности между расположенной на голове пациента лицевой дугой и Камперовской плоскостью, образованной по накожным ориентирам.
Что делать, если кожные ориентиры не совпадают с костными?
Проводить рентгенологическое исследование головы с рентгеноконтрастными накожными точками вышеописанной плоскости для более детального анализа. Клинически такая методика становится сложной, не во всех клиниках можно провести такое рентгенологическое исследование. Если данным параметром пренебречь, это может привести к изменению наклона модели в сагиттальной плоскости (рисунок 2).

Рисунок 2. Поворот модели в/ч в сагиттальной проекции по или против часовой стрелки.
Что делать если Камперовская плоскость не параллельна протетической?
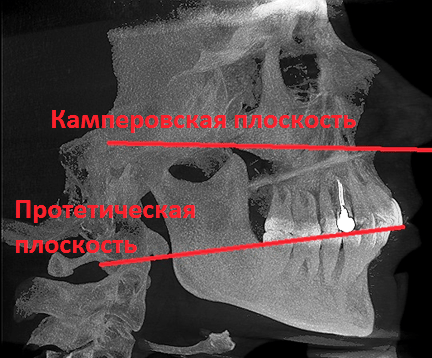
Рисунок 3. КТ головы. Анализ ориентации плоскостей.
А почему плоскости должны быть параллельными (рисунок 3)? Если в артикуляторе модель в/ч располагается приподнятой в области резцов в сагиттальной проекции, но при этом лицевая дуга ориентирована относительно костных ориентиров Камперовской плоскости правильно, это не будет является ошибкой.
Ошибки, возникающие при использовании среднеанатомических лицевых дуг, могут возникать в сагиттальной проекции (наклон модели в/ч вперед-назад), во фронтальной плоскости (наклон модели в/ч вправо или влево), в горизонтальной плоскости (поворот модели, рисунок 4).
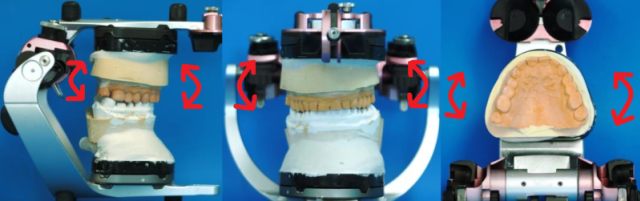
Рисунок 4. Возможные перемещения модели в/ч в артикуляторе.
Одной из самых серьезных ошибок является невозможность контролировать расстояние от в/ч до суставных головок (рисунок 5).

Рисунок 5. Гипсовка модели в/ч в артикулятор с использованием лицевой дуги. Отсутствие контроля соотношения модели и суставных механизмов артикулятора.
Эта погрешность связана с тем, что на прикусной вилке с регистратором нет ориентира для резцов в/ч, поэтому расстояние от модели до суставов не фиксировано. Известно, что для нормального функционирования гипсовых моделей в артикуляторе при учете усредненных параметров, должны учитываться данные треугольника Бонвиля (расстояние от резцов н/ч до суставных механизмов артикулятора). Но т.к. использование лицевой дуги подразумевает перенос модели в/ч, необходимо в первую очередь соблюдать индивидуальное расстояние от резцов в/ч до суставных механизмов.
Таким образом, при использовании среднеанатомических лицевых дуг существуют погрешности, которые возможно или невозможно скорректировать. Это связано с недоработками в строении самих дуг.
Решение проблем, возникающих при применении среднеанатомических лицевых дуг
Для решения проблем, возникающих при применении среднеанатомических лицевых дуг, нами была разработана методика переноса модели в/ч в артикулятор и дополнительное оборудование – центральный маркер и стойка (рисунок 6).
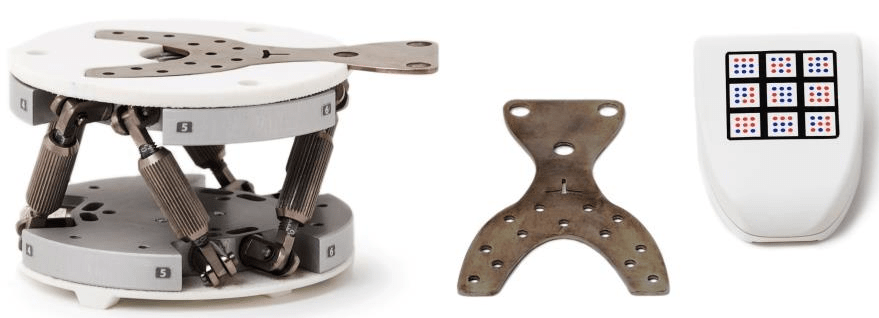
Рисунок 6. Стойка для гипсовки и центральный маркер (Prosystom).
Центральный маркер состоит из вилки и контроллера. Для контроля расположения модели в/ч на маркере имеется отметка для резцов. При использовании центрального маркера мы отказались от каких-либо накожных ориентиров в целях минимизации ошибок (рисунок 7).

Рисунок 7. Расположение центрального маркера при регистрации положения протетической плоскости.
После определения индивидуального положения протетической плоскости контроллер выдает данные для настройки стойки по индивидуальным параметрам (рисунок 8).
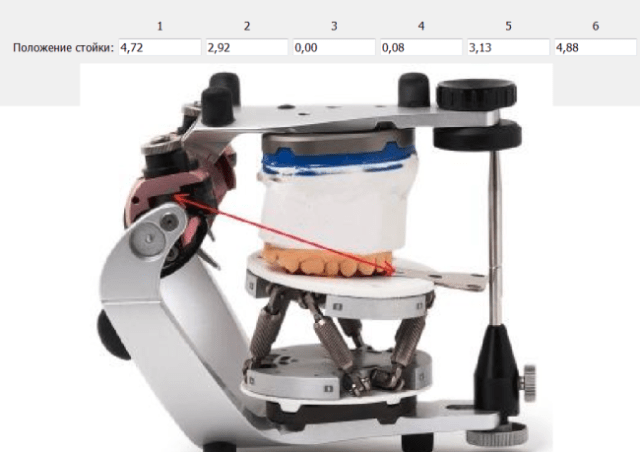
Рисунок 8. Гипсовка модели в/ч с использованием стойки в артикулятор Protar.
Для того, чтобы учесть все индивидуальные параметры при гипсовке, мы пользуемся дополнительным модулем КТ (рисунок 9).
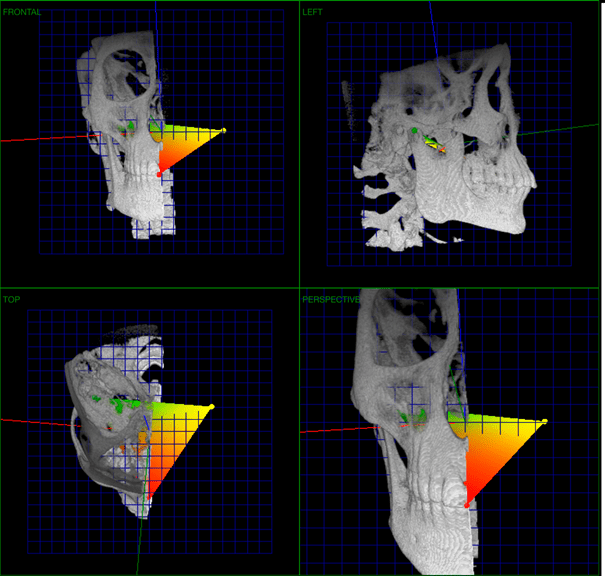
Рисунок 9. Модуль КТ для гипсовки (Prosystom).
Данный модуль позволяет измерить индивидуальное расстояние от резцов верхней челюсти до суставных головок для последующего переноса в артикулятор. В данной методике используется 3 ориентира: межрезцовая точка в области режущего края центральных зубов в/ч и точки в области суставных головок. Примечание: необоснованно ставить ориентир шарнирной оси пользуясь только КТ, это продиктовано серьезными различиями в строении суставных головок н/ч человека и артикулятора (рисунок 10).
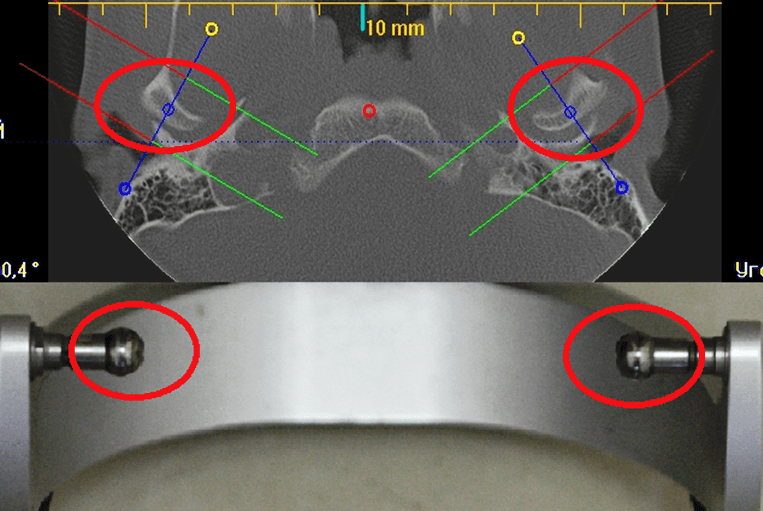
Рисунок 10. Сравнительный анализ строения анатомии головок н/ч и суставных головок нижней рамы артикулятора.
Поэтому точку в области суставов мы ставим на вершине суставов. Определение точки на суставных механизмах артикулятора также не вызывает сложности. После того, как модели правильно загипсованы в артикуляторе с учетом индивидуальных параметров, можно перейти к его настройке.
II этап: Программирование артикулятора по индивидуальным параметрам, применение электронных систем записи артикуляции н/ч, ошибки, возникающие при применении электронных аксиографов
Вторая часть статьи посвящена программированию артикуляторов: мы раскроем некоторые нерешенные проблемы при использовании электронных аксиографов, т.к. данные системы являются наиболее точными. Остается открытым вопрос, касающийся дороговизны электронных аксиографов. Данное оборудование является второстепенным при работе и нужно всего лишь для записи траекторий движения н/ч и их цифровых значений. Электронные системы регистрации представлены на рынке давно, но до сих пор они не являются особо востребованными. Почему? Высокая цена, недостаток доступной информации для врачей, погрешности при их использовании в сложных клинических случаях, некоторые аппараты имеют достаточно сложное строение.
Электронные системы записи при правильном использовании являются единственным оборудованием, позволяющим:
- зарегистрировать любые траектории движения н/ч;
- получить индивидуальные данные для программирования артикуляторов;
- получить трехмерное отображение артикуляции н/ч;
- работать в виртуальном пространстве с индивидуальными параметрами;
- получить данные для анализа динамической окклюзии с применением виртуальных моделей;
- использование данных аппаратов позволяет проводить динамическое наблюдение пациентов при длительном лечении.
Механические, электронные и виртуальные артикуляторы являются в этом списке основным оборудованием, т.к. с их применением изготавливаются конструкции. А аксиографы являются вспомогательным оборудованием, необходимым для настройки артикуляторов.
Наиболее распространенными электронными системами являются ультразвуковые. У этих систем существуют слабые стороны.
Строение параокклюзионной вилки для фиксации ультразвукового датчика (рисунок 11).
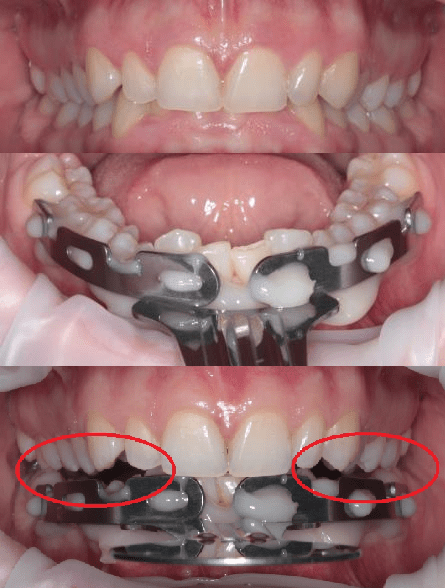
Рисунок 11. Расположение параокклюзионной вилки на зубном ряду н/ч.
Глубокое резцовое перекрытие служит относительным противопоказанием к проведению точной регистрации артикуляции н/ч. Также при низкой клинической высоте коронковой части зубов н/ч, при патологической стираемости фронтальной группы зубов н/ч вилка может препятствовать привычному смыканию зубных рядов. Мы считаем это серьезным недостатком, особенно при диагностике пациентов с дисфункциями ВНЧС, т.к. это приводит к размыканию зубных рядов: контакт остается, в основном, между резцами в/ч и параокклюзионной вилкой, что в свою очередь может приводить к неконтролируемому смещению н/ч.
В таком случае, зарегистрировать траектории движения н/ч возможно, но практически будет невозможно определить, где находились суставы в начале траекторий (рисунок 12). Артикуляционный анализ для получения цифровых данных при программировании артикулятора по индивидуальным параметрам будет бессмысленным, т.к. классические траектории с участием зубных рядов будут изменены.
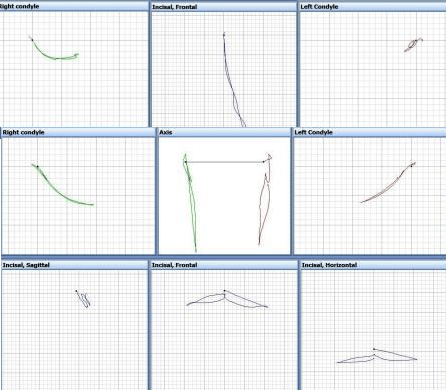
Рисунок 12. Траектории движений н/ч: открывание-закрывание и латеротрузия.
Получение разных траекторий у одного пациента при нескольких исследованиях с временным промежутком.
Сначала аксиограф фиксируется на голове пациента, проводится запись траектории (например, открывание-закрывание рта), а далее на экране отображаются траектории (рисунок 13).
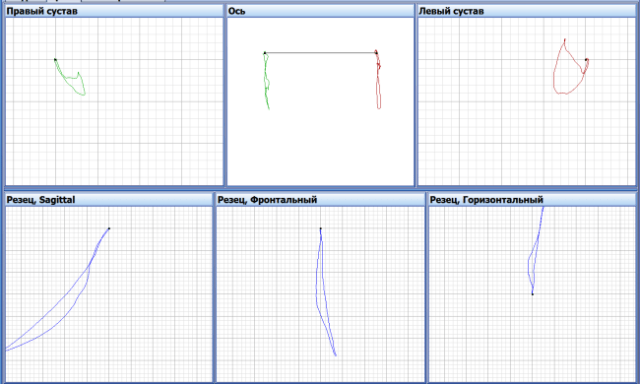
Рисунок 13. Траектории открывание-закрывание рта.
В последующем аксиограф полностью снимается с головы пациента и такое же исследование проводится через 15 минут. Но при следующем исследовании были получены иные траектории (рисунок 14).
Какие данные из этих исследований являются правильными?
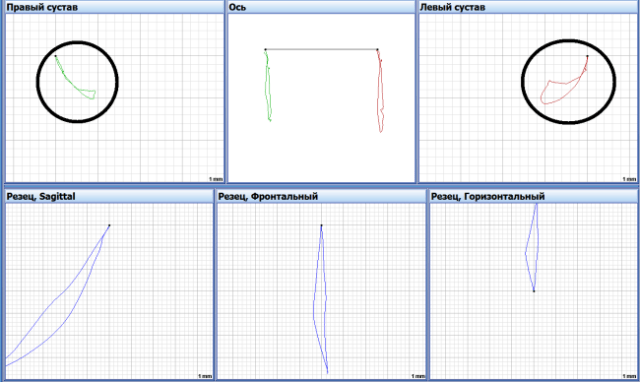
Рисунок 14. Траектории, зарегистрированные через 15 мин. Открывание-закрывание рта.
Также провели регистрацию движений н/ч с учетом зубных направляющих для получения цифровых значений углов и получили разные данные (рисунок 15).
По каким данным программировать артикулятор?
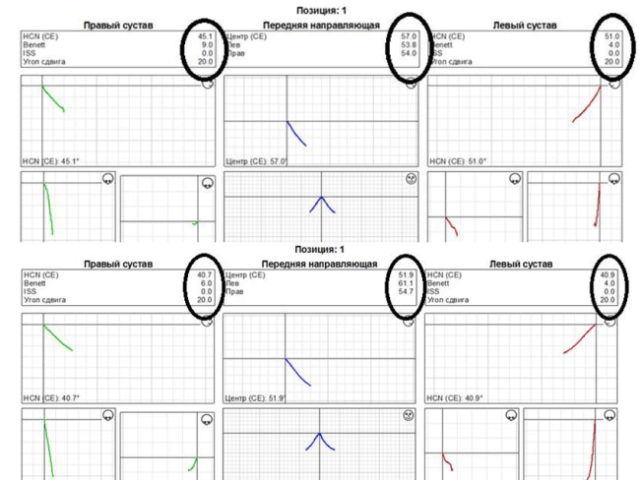
Рисунок 15. Разные данные для программирования артикулятора.
Данные ошибки возникают, в первую очередь, из-за различий в фиксации ультразвукового аксиографа на голове пациента при вышеописанных измерениях. Чтобы частично решить эти проблемы, необходимо сохранять регистрат, получаемый вилкой с зубного ряда в/ч, и не изменять расположение параокклюзионной вилки при исследованиях с временными промежутками.
Решение проблем, возникающих при электронной аксиографии
Основным результатом наших исследований явилось создание более точного и доступного аппарата для регистрации движений н/ч и корректировка самой методики проведения электронной аксиографии (рис. 16). Мы разработали аппарат Dentograf (Prosystom).
Рисунок 16. Оптический аппарат для регистрации артикуляции н/ч Dentograf (Prosystom).
Сегодня Dentogaf является самым компактным и простым в обращении аппаратом для регистрации траекторий. Это оптический аппарат, использующий в своей работе всего одну камеру.
Учитывая вышеописанные проблемы, возникающие с креплением датчика на н/ч, мы спроектировали специальные маркеры, позволяющие проводить исследования практически при любой патологии зубных рядов. Теперь глубокое резцовое перекрытие не является помехой для исследований (рисунок 17).
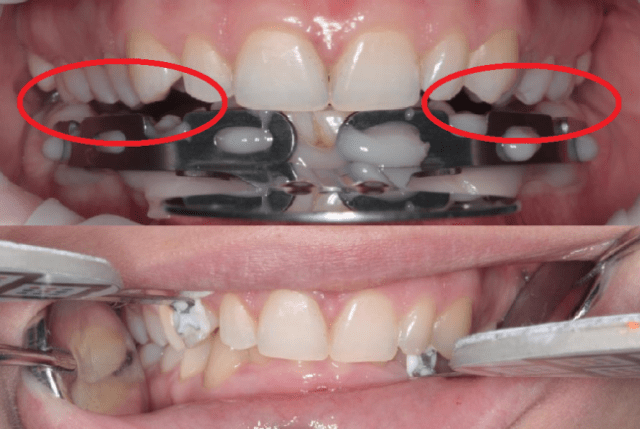
Рисунок 17. Расположение параокклюзионной вилки и боковых маркеров аппарата Dentograf.
Один центральный датчик, который служит для определения индивидуального положения протетической плоскости, два боковых (рисунок 18). Один боковой маркер крепится к зубу в/ч, другой к зубу н/ч. В данной методике мы полностью отказались от применения среднеанатомических лицевых дуг и тем самым значительно повысили точность диагностики.

Рисунок 18. Комплект датчиков аппарата Dentograf.
Появилась возможность без каких-либо проблем проводить исследования у пациентов, проходящих ортодонтическое лечение с применением брекет-систем (рисунок 19).

Рисунок 19. Расположение боковых датчиков у пациентов с брекет-системой на зубах.
Все вышеописанные методики и оборудование компании Prosystom позволяют проводить прецизионную диагностику и планировать лечение в реальном пространстве.
III этап: Использование виртуального артикулятора при первичной функциональной диагностике (работа с виртуальными моделями)
Следующая важная задача, которую мы постарались решить – применение наших возможностей в виртуальном пространстве, а именно работа с виртуальными моделями.
Что нового появилось с появлением виртуальных артикуляторов?
Механический артикулятор позволяет воспроизвести 3 траектории: протрузию, латеротрузию вправо и влево.
Виртуальный артикулятор позволяет воспроизвести 3 траектории: протрузию, латеротрузию вправо и влево.
Виртуальные артикуляторы являются полным подобием механических, поменялось лишь пространство – реальное на виртуальное.
Насколько необходимы имеющиеся виртуальные артикуляторы, если функциональные возможности их ограничены?
Например, почему отсутствует возможность в виртуальном пространстве воспроизводить любые траектории и что этому мешает?
Этому мешают имеющиеся на сегодняшнее время в программном обеспечении виртуальные артикуляторы, а точнее их строение (рисунок 20).
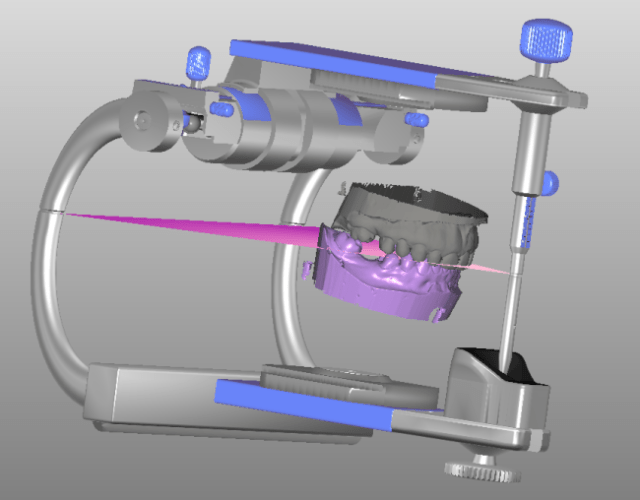
Рисунок 20. Виртуальный артикулятор.
Решение проблем, возникающих при применении виртуальных артикуляторов.
Для работы в виртуальном пространстве, учитывая индивидуальные параметры пациента, необходимы: компьютерная томография, виртуальные модели, траектории движения и правильная ориентация виртуальной модели в/ч и н/ч.
Если попробовать исключить артикулятор при работе в виртуальном пространстве, то появляются новые перспективные возможности:
- Индивидуальное соотношение виртуальных моделей и суставов н/ч. Для этого нужно использовать КТ головы пациента и виртуальные модели. Соединить КТ и модели не представляет на сегодняшнее время больших сложностей (рисунок 21).
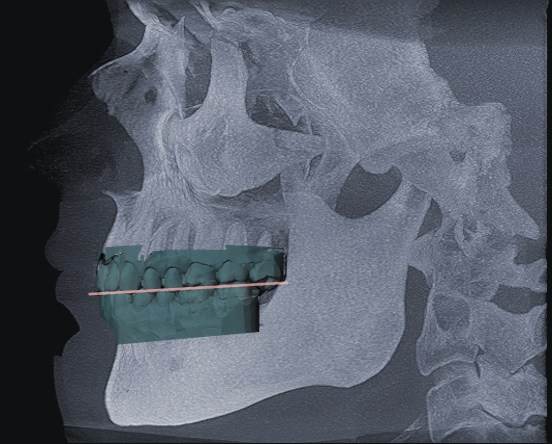
Рисунок 21. Объединение КТ и виртуальных моделей.
- Воспроизведение любых траекторий артикуляции н/ч с применением виртуальных моделей (рисунок 22). Для этого мы используем аппарат Dentograf.
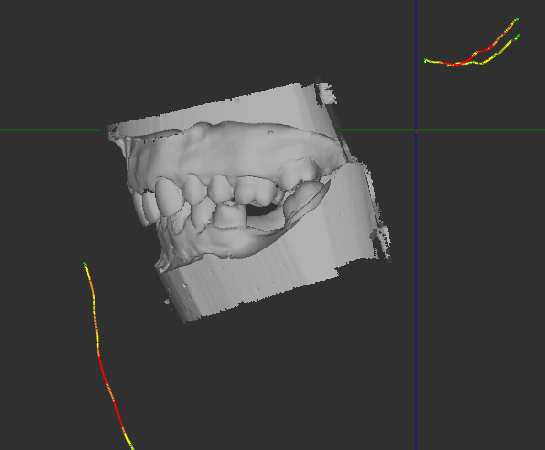
Рисунок 22. Траектории движения н/ч и виртуальные модели.
- Ориентация моделей в виртуальном пространстве. Применение центрального маркера позволяет расположить модель в/ч в виртуальном пространстве так же, как у пациента (рисунок 23).

Рисунок 23. Применение центрального маркера для позиционирования моделей в виртуальном пространстве.
Проведение функциональной диагностики ВНЧС (Заключение)
Нами разработана комплексная методика и новое оборудование при проведении первичной функциональной диагностике ВНЧС. Данное оборудование является универсальным для работы в реальном и виртуальном пространствах с минимальными погрешностями.
Более подробно о диагностике поражений ВНЧС на вебинаре Рентгенологическое исследование ВНЧС. Продвинутый уровень.
http://stomanet.ru/