
Путь скольжения с инструментом для поиска пути с ротационным приводом: эффективность и частота переломов
Машинный перевод
Оригинальная статья написана на языке EN (ссылка для ознакомления) .
Аннотация
Введение: В данном исследовании оценивалось количество мезиальных и дистальных каналов нижних моляров, в которых инструмент R-Pilot для поиска пути достиг рабочей длины (WL) во время процедуры макро-гладкого пути. Также оценивались уровни разрушения и деформации. Методы: Сто пятьдесят шесть корневых каналов 52 зубов были исследованы до длины апикального отверстия. Затем инструмент R-Pilot был установлен на устье канала и активирован. Инструмент перемещался с помощью покачивающего движения и легкого апикального давления. Эта процедура повторялась в попытке достичь WL. Тип разрушения и/или деформации инструмента оценивался с помощью сканирующей электронной микроскопии, в то время как корни с разрушенными инструментами сканировались с помощью микро-компьютерной томографии. Процентное распределение частоты разрушений, деформаций и корневых каналов, в которых R-Pilot достиг WL, было зафиксировано и статистически сравнивалось с использованием теста χ2 Пирсона с α = 5%. Результаты: Инструменты R-Pilot достигли WL в 139 корневых каналах (89.10%), и тест χ2 показал значительную разницу между наблюдаемыми частотами и ожидаемыми частотами (χ2 = 95.41, P = .000). Наблюдаемые частоты разрушений (2.56%) и деформаций (1.92%) также были значительно ниже ожидаемых (разрушение: χ2 = 140.41, P = .000; деформация: χ2 = 144.23, P = .000). Разрушения происходили в основном на апикальных и изогнутых участках корневых каналов. Заключение: R-Pilot достиг WL в 89.10% корневых каналов нижних моляров с уровнями разрушения и деформации 2.56% и 1.92% соответственно. (J Endod 2020;■:1–5.)
Глайд-путь был определен как клиническая процедура для расширения или создания гладкого туннеля от корональной части корневого канала до его физиологического терминала перед его окончательным увеличением, с целью контроля крутящего момента и снижения вероятности разрушения инструментов из никель-титана (NiTi). Основные шаги, предшествующие глайд-пути, называются «микро-глайд-путь» и включают как исследование канала, так и апикальную проходимость (т.е. местоположение выхода основного отверстия); они обычно выполняются с помощью небольших предварительно изогнутых ручных инструментов из нержавеющей стали и аккуратных движений. Однако эти предварительные процедуры могут быть сложными и трудоемкими в клиниках, особенно при работе с изогнутыми и/или кальцинированными корневыми каналами. После успешного выполнения микро-глайд-пути уже исследованный канал все еще необходимо дополнительно расширить, процедура, называемая «макро-глайд-путь». Это выполняется с использованием либо ручных инструментов, либо специально разработанных механически приводимых инструментов NiTi; последние предпочтительнее, так как они связаны с уменьшением послеоперационной боли и обострений, а также с лучшим сохранением оригинальной анатомии канала. С другой стороны, поскольку канал все еще узкий, использование ротационных инструментов NiTi с небольшими размерами, так называемых «путеводителей», было отмечено как более подверженное разрушению и непредсказуемое с точки зрения клинической эффективности и безопасности. С целью преодоления этих недостатков было предложено несколько подходов, включая изменения в их сплаве NiTi, дизайне и, более недавно, в кинематике движения.
Рециркуляционное движение открыло новые перспективы для механически активируемой подготовки, поскольку оно сокращает рабочее время, циклическую усталость и крутящий момент инструментов по сравнению с непрерывным вращением. Недавно был представлен инструмент R-Pilot (VDW GmbH, Мюнхен, Германия) для подготовки макро-гладкой траектории в рециркуляционном движении. R-Pilot изготовлен из сплава NiTi M-Wire с конусностью 0,04, S-образным поперечным сечением и некорректирующим наконечником диаметром 0,125 мм. Хотя его механические свойства были оценены в предыдущих исследованиях, его эффективность для достижения рабочей длины (WL) все еще неизвестна. Поэтому настоящая работа была направлена на оценку частоты разрушения и деформации, а также количества корневых каналов, в которых инструмент R-Pilot смог достичь WL медиальных и дистальных каналов нижних моляров во время процедуры макро-гладкой траектории.
Рабочие гипотезы этого исследования заключались в том, что инструменты R-Pilot достигают WL с высокой частотой случаев и имеют низкие показатели разрушения/деформации.
Материалы и методы
Оценка размера выборки
На основе исследования с аналогичным экспериментальным дизайном размер эффекта для использования рециркуляционного движения для достижения рабочего длины (WL) был определен как 0.296. Таким образом, с использованием семейства χ2 и теста на соответствие (G*Power 3.1 для Macintosh; Heinrich Heine, Universität Düsseldorf, Düsseldorf, Германия) с дополнительными параметрами альфа-ошибки 0.05 и бета-степени 0.95, минимальный размер выборки составил 149 корневых каналов.
Выбор образцов
После одобрения этого проекта местным этическим комитетом (протокол № 2.985.618) было случайным образом выбрано всего 100 первых и вторых нижних моляров, удаленных по причинам, не связанным с этим исследованием, из пула зубов, рентгенографированных в мезиальном и дистальном направлениях с использованием цифрового датчика (Schick CDR цифровая рентгенографическая система; Dentsply Sirona, Шарлотт, Северная Каролина) и хранившихся в 0.5% растворе тимола при 5◦C. Зубы с открытым апексом, резорбциями или переломами корня были исключены. Критерии включения состояли из нижних моляров со moderately curved roots (10◦– 20◦), 2 независимыми мезиальными корневыми каналами, от уровня его орifice до его апикального терминуса, и 1 или 2 независимыми каналами на дистальном корне. Впоследствии было выбрано 52 нижних моляра с 156 корневыми каналами.
Подготовка пути скольжения
После подготовки обычного доступа каждый зуб был установлен на специальном аппарате (IM Brazil, São Paulo, SP, Brazil), который имитирует альвеолярную лунку и позволяет подключить металлический зажим к электронному локатору верхушки (EAL), согласно предыдущему исследованию. Как рекомендовано производителем, перед использованием инструмента R-Pilot была выполнена разведка корневого канала (микро путь скольжения) с помощью ручного файла размером 25 мм .08 (C-Pilot; VDW GmbH), подключенного к EAL (Root ZX; J Morita USA Inc, Irvine, CA), применяя легкое до умеренного давление и осторожные вращательные движения вдоль корневого канала, пока экран EAL не показал отметку "0.0". WL был установлен как эта контрольная точка.
Перед процедурой макро пути скольжения все выбранные инструменты R-Pilot были осмотрены через операционный микроскоп с увеличением X16, чтобы исключить инструменты с критическими дефектами или деформациями, и ни один не был исключен. Инструмент R-Pilot затем был установлен на угловую насадку (Sirona, Bensheim, Germany), работающую от электрического мотора (VDW Gold; VDW GmbH), и держатель файла EAL был зажат к неактивной части лезвия. После этого R-Pilot был позиционирован на уровне отверстия с тем же углом вставки, что и у разведочного файла, пока не почувствовалось сопротивление и не была активирована реверсивная движение ("RECIPROC ALL" режим). Инструмент был перемещен в апикальном направлении с помощью 3 движений "вход-выход" амплитудой около 3 мм с легким апикальным давлением, после чего он был удален из канала, очищен с помощью марли, смоченной алкоголем, и осмотрен на наличие трещин или деформаций. Затем корневой канал был промыт 2 мл 2,5% гипохлорита натрия. Эта процедура повторялась 3 раза в попытке достичь WL. После этого, если инструмент не достиг WL, эта процедура была остановлена.
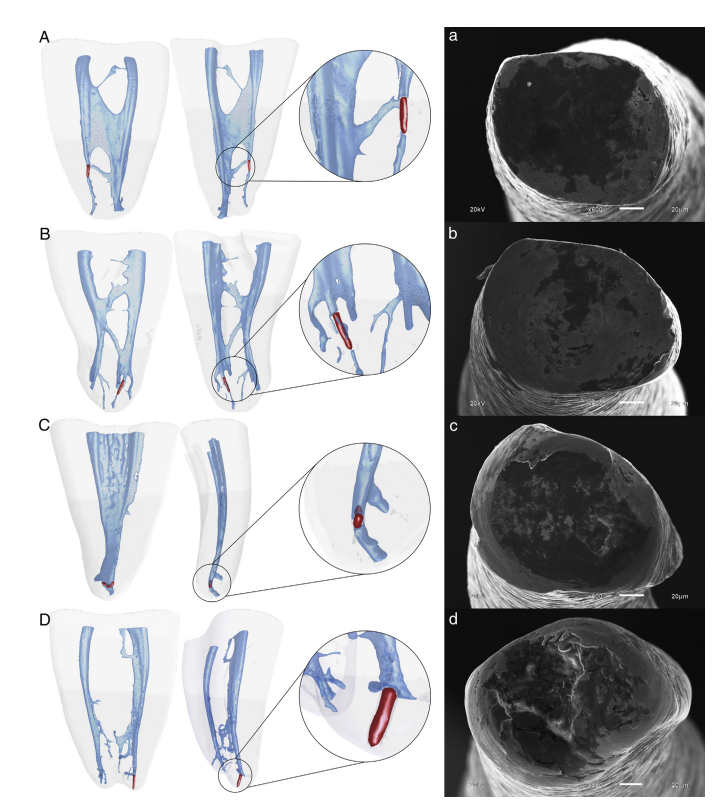
Записывались количество переломов, деформаций и корневых каналов, в которых инструмент R-Pilot достиг WL. Тип перелома и/или деформации определялся при увеличении от X200 до X2000 с помощью сканирующего электронного микроскопа (SEM) (JEOL JSM 6510 LV; JEOL, Токио, Япония) после ультразвуковой очистки инструментов. Кроме того, корни с переломанным инструментом сканировались в устройстве микро-компьютерной томографии (микро-CT) (SkyScan 1173; Bruker microCT, Контрих, Бельгия), работающем на 80 кВ и 100 мА, с изотропным разрешением 12.82 мм, 360◦ вращением вокруг вертикальной оси и шагом вращения 0.4◦, чтобы проверить возможные причины перелома (Рис. 1). Все процедуры выполнял специалист в области эндодонтии с 5-летним клиническим опытом, и каждый инструмент использовался только в 1 зубе и утилизировался.
Статистический анализ
Записывались процентные частотные распределения (%) образцов, в которых инструмент R-Pilot достиг и не достиг WL, и статистически сравнивались с использованием теста χ2 Пирсона. Ошибка типа альфа и критическое значение χ2 были установлены на уровне 0.05 и 3.84 соответственно, как указано в расчете мощности выборки.
Результаты
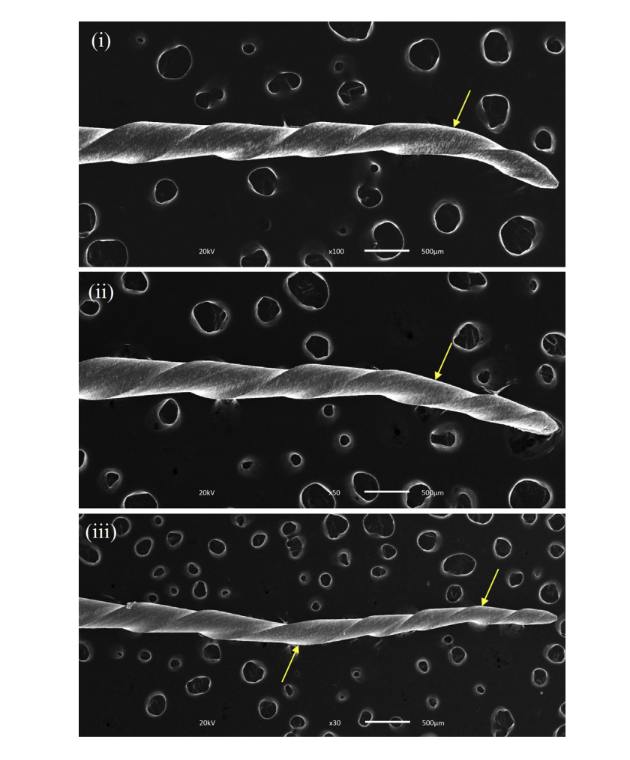
В целом, инструменты R-Pilot достигли рабочей длины (WL) в 139 корневых каналах (89.10%). Тест c2 показал, что наблюдаемые частоты, при которых R-Pilot достиг рабочей длины, значительно отличались от ожидаемых частот (χ2 = 95.41, P = .000). В ходе эксперимента было зафиксировано 4 поломки инструментов (2.56%), которые были классифицированы как смешанные (n = 3) и крутильные (n = 1) (Рис. 1), в то время как 3 инструмента (1.92%) показали деформацию лезвия (Рис. 2). Анализ хи-квадрат показал, что наблюдаемые частоты поломок и деформаций также были значительно ниже ожидаемых (поломка: χ2 = 140.41, P = .000; деформация: χ2 = 144.23, P = .000). Рисунок 1 показывает трехмерные (3D) модели, полученные с помощью микрокомпьютерной томографии (микро-КТ) 4 корней, изображающие сломанные инструменты, расположенные в основном в апикальной части корня, с размерами от 0.67 до 0.85 мм.
Обсуждение
Инструменты R-Pilot достигли рабочей длины в 139 из 156 мезиальных и дистальных корневых каналов (89,10%) нижних моляров, с низким процентом частоты переломов и деформаций. Таким образом, рабочие гипотезы данного исследования были подтверждены. Полученные результаты довольно интересны, особенно в сравнении с возможностью ротационно управляемых инструментов для нахождения пути к апикальному отверстию (38,30%–68,30%). Полученные данные можно объяснить тремя основными причинами:
- асимметричная возвратно-поступательная кинематика, которая поддерживает апикальное продвижение инструмента, уменьшая крутящий момент,
- дизайн инструмента с небольшим диаметром наконечника (0,125 мм) и постоянным сужением (0,04 мм), который минимизирует его контакт с дентиновыми стенками, и
- S-образное поперечное сечение, которое обеспечивает эффективную режущую способность.
Во время подготовки основного пути скольжения инструмент подвергается механическому стрессу и может сломаться из-за крутящего момента или циклической усталости. Поскольку инструменты для поиска пути более гибкие из-за своих меньших размеров, циклическая усталость, похоже, менее актуальна, чем крутящий момент, как причина разрушения инструмента. В настоящем исследовании были зафиксированы очень низкие показатели разрушения (2,56%) и деформации (1,92%), а использованный корреляционный подход к визуализации позволил качественно понять причины отказа инструмента. Сломанные инструменты были оценены с помощью SEM-анализа, а 4 корня с фрагментами R-Pilot были отсканированы в устройстве микро-КТ. SEM-анализ продемонстрировал смешанные типы разрушений в 3 инструментах и крутильный отказ в другом инструменте (Рис. 1), в то время как анализ 3D моделей показал, что 2 из корней имели относительно прямые, но узкие корневые каналы, и разрушение произошло в средней (n = 1) и апикальной (n = 1) третьях, в то время как другие инструменты сломались на изгибе апикального канала (Рис. 1). Можно предположить, что возникновение единственного типа крутильного разрушения было следствием возвратно-поступательного движения, которое эффективно избегало явления заедания сужения, которое часто происходит при непрерывной ротации. С другой стороны, смешанные разрушения, возможно, были связаны с действиями оператора. Продвижение этого типа инструмента к апексу несколько затруднительно, и не редкость, когда оператор увеличивает на него давление, вызывая его изгиб из-за низкого сужения и малого сердечника. В совокупности увеличенная гибкость, заедание наконечника и апикальный изгиб, возможно, стали причиной смешанных разрушений.
Несколько исследований показали эффективность EAL, продемонстрировав, что электронный метод является лучшим способом для правильного определения WL. Кроме того, Root ZX обычно считается золотым стандартом EAL. Показание EAL 0.0 имеет значение, поскольку оно показывает определение основного апикального отверстия. Таким образом, в данном исследовании отметка 0.0 Root ZX использовалась в качестве контрольной точки для оценки работы инструмента R-Pilot.
В сравнительных исследованиях крайне важно стандартизировать образец, чтобы избежать предвзятости, связанной с морфологией корневого канала. Однако настоящее исследование не является сравнительным. Поэтому были выбраны корневые каналы со средней кривизной, учитывая их высокую частоту в нижних молярах и потому, что они представляют собой клиническую задачу для выполнения процедур по созданию направляющего пути. Все корневые каналы, по-видимому, были проходимыми, поскольку разведка была успешно выполнена с помощью ручного файла .08. Это означает, что никаких значительных анатомических проблем не могло быть признано основной причиной того, что инструменты R-Pilot не достигли WL. Возможно, что дентинные обломки, образовавшиеся во время управления направляющим путем, были упакованы в апикальный канал, что помешало инструментам достичь отверстия, что лишь подчеркивает важность ирригации корневого канала; однако это еще предстоит доказать в дальнейших исследованиях.
Оценка процентной частоты, с которой инструменты для поиска каналов достигали WL без поломок или искажений, кажется лучшим методом для ранжирования их производительности и безопасности. В этом смысле методология, примененная в данном исследовании, очень хорошо подходит для этой цели. Также важно подчеркнуть, что при изучении частоты данного события в популяции контрольная группа не всегда необходима. Например, в настоящем исследовании статистическая процедура χ2 адекватно подтверждает значимость наблюдаемых частот. Таким образом, природа настоящего исследования не была сравнительной, и не требовалась контрольная группа, поскольку основная цель заключалась в наблюдении за производительностью инструментов R-Pilot, первых ротационных инструментов, вышедших на рынок. Этот момент можно считать ограничением данного исследования, но большой размер выборки, необходимый для получения надежного профиля производительности данного инструмента, может быть учтен. Поэтому необходимы дальнейшие исследования с использованием предложенного метода для оценки производительности новых ротационных инструментов для поиска каналов.
Выводы
В условиях настоящего исследования можно сделать вывод, что инструменты R-Pilot достигли рабочей длины (WL) в 89,10% ранее исследованных мезиальных и дистальных каналов нижних моляров с частотой переломов и деформаций 2,56% и 1,92% соответственно.
Авторы: Густаво Де-Деус, Мила Лесса Кардозо, Марко Симойнс-Карвальо, Эммануэль Ж. Н. Л. Силва, Фелипе Гонкальвеш Белладонна, Даниэле Морея Кавалканте, Диого да Силва Оливейра, Эрик Миранда Соузa, Рикардо Тадеу Лопес, Марко Aurélio Версини
Ссылки:
- West JD. Эндодонтический Glidepath: «секрет безопасности ротации». Dent Today 2010;29:90–3.
- Ruddle CJ, Machtou P, West D. Подготовка эндодонтического канала: новые инновации в управлении Glide path и формировании каналов. Dent Today 2014;33:1–7.
- Van der Vyver PJ. Создание Glide path для ротационных инструментов NiTi: первая часть. Int Dent J 2010;13:6–10.
- Van der Vyver PJ. ProGlider™: клинический протокол. Endod Practice 2014;7:42–7.
- Jonker CH, Van der Vyver PJ, De Wet FA. Влияние подготовки Glide path на частоту отказов инструментов WaveOne. SADJ 2014;69:266–9.
- Berutti E, Negro AR, Lendini M, Pasqualini D. Влияние ручного предварительного расширения и крутящего момента на частоту отказов ротационных инструментов ProTaper. J Endod 2004;30:228–30.
- Patiño PV, Biedma BM, Li´ebana CR и др. Влияние ручного Glide path на частоту разъединения ротационных инструментов NiTi. J Endod 2005;31:114–6.
- Pasqualini D, Bianchi CC, Paolino DS и др. Компьютерная микротомографическая оценка Glide path с ротационным инструментом PathFile из никель-титана в изогнутых каналах верхних первых моляров. J Endod 2012;38:389–93.
- Berutti E, Cantatore G, Castellucci A и др. Использование ротационного инструмента PathFile из никель-титана для создания Glide path: сравнение с ручным предварительным расширением в смоделированных корневых каналах. J Endod 2009;35:408–12.
- De-Deus G, Belladonna FG, Souza EM и др. Способность к исследованию 4 инструментов для поиска пути в умеренно изогнутых каналах моляров. J Endod 2016;42:1540–4.
- Pasqualini D, Mollo L, Scotti N и др. Послеоперационная боль после ручного и механического Glide path: рандомизированное клиническое испытание. J Endod 2012;38:32–6.
- Elnaghy AM, Elsaka SE. Оценка транспортировки корневого канала, соотношения центрирования и оставшейся толщины дентин, связанных с инструментами ProTaper Next с Glide path и без него. J Endod 2014;40:2053–6.
- Arias A, Singh R, Peters OA. Различия в крутящем моменте одноразовых и многоразовых ротационных систем для подготовки Glide path. Odontology 2016;104:192–8.
- Grande NM, Ahmed HM, Cohen S и др. Текущая оценка ротации в эндодонтической подготовке: всеобъемлющий обзор — часть I: исторические перспективы и современные применения. J Endod 2015;41:1778–83.
- Plotino G, Ahmed HM, Grande NM и др. Текущая оценка ротации в эндодонтической подготовке: всеобъемлющий обзор — часть II: свойства и эффективность. J Endod 2015;41:1939–50.
- Keskin C, _Inan U, Demiral M, Kelesx A. Устойчивость к циклической усталости инструментов R-Pilot, WaveOne Gold Glider и ProGlider для Glide path. Clin Oral Invest 2018;22:3007–12.
- Özyürek T, Uslu G, Gündoğar M и др. Сравнение устойчивости к циклической усталости и свойств изгиба двух ротационных файлов из никель-титана для Glide path. Int Endod J 2018;51:1047–52.
- Topçuoğlu HS, Topçuoğlu G, Kafdağ Ö, Arslan H. Устойчивость к циклической усталости новых ротационных файлов Glide path в каналах с изгибом 45 и 60 градусов. Int Endod J 2018;51:1053–8.
- Yılmaz K, Uslu G, Gündoğar M и др. Устойчивость к циклической усталости нескольких ротационных и рециркуляционных инструментов из никель-титана при температуре тела. Int Endod J 2018;51:924–30.
- Santos CB, Simões-Carvalho M, Perez R и др. Устойчивость к крутящему моменту систем ротационных инструментов R-Pilot и WaveOne Gold Glider NiTi. Int Endod J 2019;52:874–9.
- Sung SY, Ha JH, Kwak SW и др. Устойчивость к крутящему моменту и циклической усталости инструментов для подготовки Glide path: G-file и PathFile. Scanning 2014;36:500–6.
- Gambarini G, Plotino G, Sannino GP и др. Циклическая усталость инструментов для эндодонтического Glide path. Odontology 2015;103:56–60.
- Martins JNR, Marques D, Mata A, Carame^s J. Клиническая эффективность электронных локаторов верхушки: систематический обзор. J Endod 2014;40:759–77.
- Tsesis I, Blazer T, Ben-Izhack G и др. Точность электронных локаторов верхушки в определении рабочей длины: систематический обзор и мета-анализ литературы. J Endod 2015;41:1818–23.
- Stöber EA, Duran-Sindreu F, Mercadé M и др. Оценка локаторов верхушки Root ZX и iPex: исследование in vivo. J Endod 2011;37:608–10.